NVIDIA 自动驾驶实验室:自动驾驶中的动态视角鲁棒性解析
更新时间:2023-12-27 23:43:01作者:xhjaty
汽车制造商正在将自动化和自动驾驶功能整合到车队中,然而当技术扩展到新车型时,会面对新的挑战。例如鸟瞰分割图等感知模型,是使用通过轿车收集的数据而开发的。当其设置在 SUV 上时,由于摄像机视角的明显差异,其准确性会下降。在本期自动驾驶实验室中,将讨论视角的鲁棒性,并介绍 Dynamic View Synthesis 所提供的解决方案。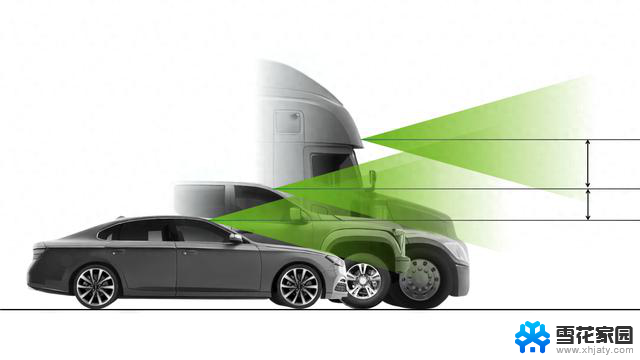
观看本期自动驾驶实验室视频,了解更多信息:
00:00:33
视角鲁棒性及最新解决方案
00:01:34
通过 Dynamic View Synthesis 来消除视角挑战
00:01:51
不同视角之间的多视一致性
00:02:24
神经辐射场 (NeRF) 对视角鲁棒性的效果不佳
00:02:37
训练深度神经网络(DNN)以用于从单一图像估计场景深度
00:03:34
大规模部署感知模型
//
扩展阅读:
《使用合成数据处理自动驾驶新视角感知》
开发能够在不同类型车辆上鲁棒的运行的感知堆栈是一项巨大的数据挑战。而合成数据生成和用于新视角合成(NVS)的 AI 技术能够实现感知灵敏度的系统测量。这大大提高了现有数据集的价值,并缩短了为其他车辆部署感知堆栈的时间。
NVIDIA DRIVE Sim 中的合成数据集以及 NVIDIA 在新视角合成(NVS)方面的最新研究可以帮助填补数据缺口,并帮助在部署新传感器配置时保持感知准确性。以加速各种尺寸和大小自动驾驶汽车的感知算法的训练。
使用合成数据处理自动驾驶新视角感知
NVIDIA DRIVE 相关资源
NVIDIA 自动驾驶实验室:自动驾驶中的动态视角鲁棒性解析相关教程
-
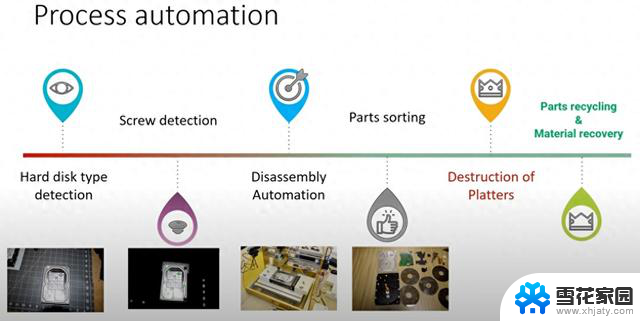 微软自动化机器人拆解回收HDD,实现大量有价值材料回收
微软自动化机器人拆解回收HDD,实现大量有价值材料回收2024-09-14
-
 NVIDIA以90%的份额主导AI GPU市场:行业霸主的实力无可撼动
NVIDIA以90%的份额主导AI GPU市场:行业霸主的实力无可撼动2024-01-30
-
 1050显卡性能评测:游戏体验与性价比分析,看看这款显卡在游戏中的表现如何
1050显卡性能评测:游戏体验与性价比分析,看看这款显卡在游戏中的表现如何2024-10-28
-
 RTX 4090实测:546.17 VS 522.25版显卡驱动,性能提升是否真实?
RTX 4090实测:546.17 VS 522.25版显卡驱动,性能提升是否真实?2023-11-18
系统资讯推荐
- 1 每小时用8度电,NVIDIA Blackwell B200又一参数细节曝光!- 最新消息
- 2 消息称FTC准备对微软云计算业务展开反竞争行为调查,微软云计算业务或将面临反竞争调查
- 3 NVIDIA App整合GeForce Experience和控制面板,Beta测试结束
- 4 详细步骤教你如何安装Win10系统,轻松搞定安装Win10系统的方法
- 5 详细步骤教你如何安全更换电脑CPU,实用指南
- 6 如何有效升级显卡以提升游戏性能和视觉体验,游戏显卡升级攻略
- 7 详细步骤教你如何安装Windows系统并解决常见问题,轻松搞定电脑重装
- 8 英特尔Battlemage GPU消息汇总 能打AMD英伟达吗?细节曝光
- 9 英伟达超越苹果,成为市值3.6万亿美元的首家上市公司历史性时刻
- 10 现役旗舰顶级CPU风冷!吊不吊,你说了算!最全面评测
win10系统推荐
系统教程推荐
- 1 win7如何进pe系统 win7怎么制作pe系统
- 2 xp系统改win7系统步骤 XP系统换成win7系统方法
- 3 win11edge消息推送电脑怎么打开 弘电脑如何设置动态提醒和回复通知
- 4 win11锁屏后如何让屏幕一直亮着 Win11怎么设置屏幕常亮时间
- 5 win10系统能用f12一键还原吗 戴尔按f12恢复系统操作步骤
- 6 增值税开票软件怎么改开票人 增值税开票系统开票人修改方法
- 7 网格对齐选项怎么取消 网格对齐选项在哪里取消
- 8 电脑桌面声音的图标没了 怎么办 电脑音量调节器不见了怎么办
- 9 键盘中win是那个键 电脑键盘win键在哪个位置
- 10 电脑如何连接隐藏的wifi网络 电脑如何连接隐藏的无线WiFi信号